


 技术咨询
技术咨询
最新资讯
- 如何解决光伏并网点谐波问题07-23
- 光伏并网点谐波会引发哪些问题07-23
- 光伏并网点出现谐波怎么处理07-23
- 动态补偿柜的应用范围是什么07-23
- 无功功率补偿柜的动态是如何实现的07-23
- 云中心是否适合做电力集控站07-21
- 云中心模式下,如何确保电网安全07-21
- 电力集控使用云中心会带来哪些优势07-21
- 电力集控使用云中心的安全性如何保障07-21
- 关于电力集控使用云中心,有什么解决方案07-21
contact us
联系我们

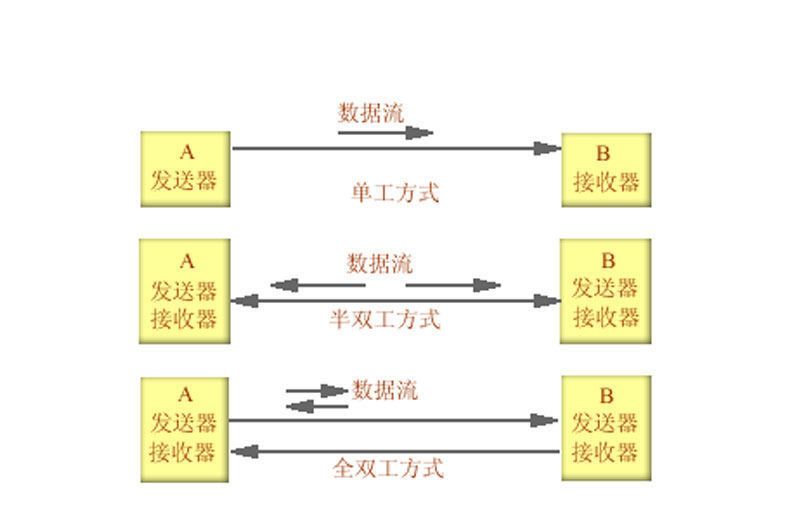
CAN口通信方式介绍
- 编辑 :
专注微机保护
时间 : 2025-06-23 09:56 浏览量 : 19
相关文章
- 如何解决光伏并网点谐波问题 07-23
- 光伏并网点谐波会引发哪些问题 07-23
- 光伏并网点出现谐波怎么处理 07-23
- 动态补偿柜的应用范围是什么 07-23
- 无功功率补偿柜的动态是如何实现的 07-23
- 云中心是否适合做电力集控站 07-21
- 云中心模式下,如何确保电网安全 07-21
- 电力集控使用云中心会带来哪些优势 07-21
- 电力集控使用云中心的安全性如何保障 07-21
- 关于电力集控使用云中心,有什么解决方案 07-21